东风纳米回应L2智能驾驶偏右问题:技术细节与后续改进
导读:在智能驾驶技术逐渐成为汽车行业发展趋势的背景下,智能驾驶系统的性能和可靠性备受关注。近日,东风纳米针对车主反映的纳米06车型L2智能驾驶辅助功能向右跑偏问题进行
在智能驾驶技术逐渐成为汽车行业发展趋势的背景下,智能驾驶系统的性能和可靠性备受关注。近日,东风纳米针对车主反映的纳米06车型L2智能驾驶辅助功能向右跑偏问题进行了回应。东风纳米详细说明了问题的技术背景,并介绍了其正在采取的改进措施。该事件不仅凸显了智能驾驶系统技术的挑战,也反映了汽车品牌在面对用户反馈时的应对与改进能力。
1. 智能驾驶辅助系统的基本原理与偏差问题
L2智能驾驶辅助系统旨在实现部分自动化驾驶,减轻驾驶员的操控负担。该系统通过车载传感器、雷达与摄像头等设备收集路况信息,并根据这些数据做出行车决策。智能驾驶系统的核心在于通过算法和模型的支持,在保证安全的基础上对驾驶进行自动控制。尽管系统在技术上日臻成熟,部分车型依然会面临一些实际应用中的问题,如车主反馈的偏向右侧的现象。
2. “端到端模型”与右侧偏差的关联
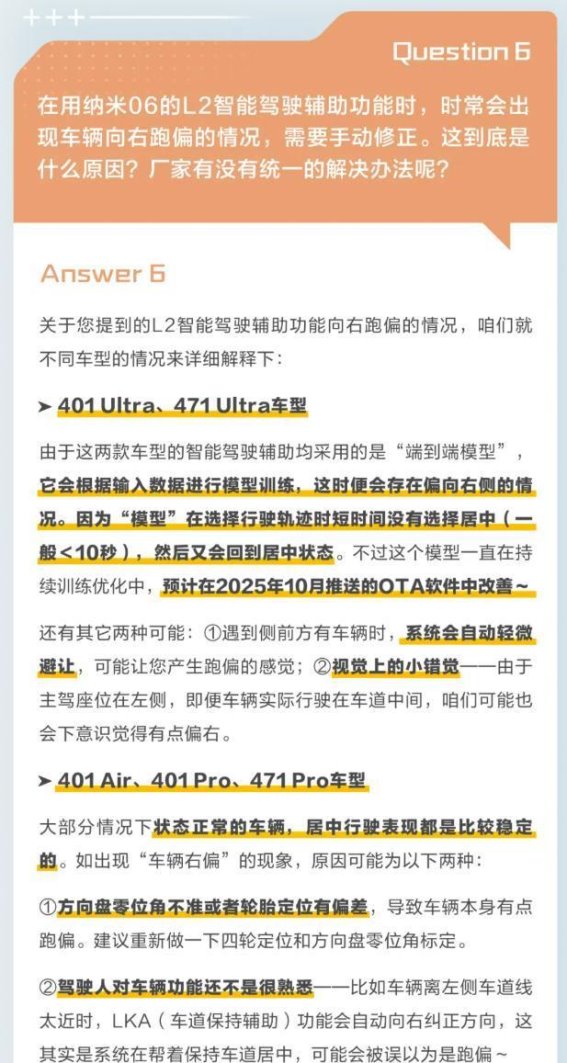
在此次事件中,东风纳米解释了L2智能驾驶辅助系统出现偏右现象的根源。具体来说,401 Ultra和471 Ultra车型所搭载的智能驾驶系统采用了“端到端模型”这一先进技术。端到端模型通过收集大量的驾驶数据进行训练,从而逐步优化决策过程。尽管这一模型具有高度的适应性和自动优化能力,但在某些情况下,它可能会因训练数据的不同或环境因素的影响,导致车辆在行驶过程中产生微小的轨迹偏差。
这种偏差通常表现为车辆在使用自动驾驶功能时稍微偏离中线,尤其是在没有显著障碍物或者车道标线模糊的情况下更为明显。东风纳米指出,这一问题是由于智能驾驶系统在选择行驶轨迹时,短时间内未能完全选择居中路径,导致车辆出现轻微的右偏。
3. 智能驾驶技术中的挑战与应对策略
智能驾驶技术的发展并非一蹴而就,尤其是涉及到“端到端模型”这种需要大量数据支持的算法时,偶尔出现系统偏差是难以避免的。东风纳米表示,在智能驾驶的实际应用中,如何保证算法和模型的稳定性,是技术发展的重要课题之一。车主反馈的右侧偏差现象表明,当前模型仍存在一定的调整空间,特别是在处理复杂驾驶环境时,系统的决策精确度亟需提升。
东风纳米同时强调,智能驾驶系统的优化不仅依赖于软件和算法的调整,还需要持续的实际数据支持。为了进一步提升L2智能驾驶辅助系统的稳定性,品牌计划进行一系列技术改进。包括通过更精细的算法优化,来减少或消除偏差问题。
4. 解决方案与后续计划
对于车主反映的“向右跑偏”问题,东风纳米表示已经启动了软件更新计划,并将在未来几个月内发布新的固件版本。这些更新将会针对偏差现象进行修正,优化智能驾驶系统的路径选择算法,确保车辆行驶轨迹的稳定性。
东风纳米还表示,在接下来的技术迭代中,将增加更多的驾驶场景模拟训练,并根据更多车主的使用反馈,进一步调优L2智能驾驶功能的表现。品牌方面还提出,除了技术层面的改进,还将加强与车主的沟通,确保用户能够及时了解系统更新和解决方案。
5. 智能驾驶的未来:挑战与机遇并存
尽管智能驾驶技术正在不断进步,但它仍然面临着来自多个方面的挑战。从数据收集到算法优化,再到实际道路环境的适应性,每一个环节都需要技术团队的持续投入与调整。东风纳米此次对L2智能驾驶辅助系统偏右问题的回应,既展现了品牌快速响应市场反馈的能力,也反映了其对智能驾驶技术持续改进的决心。
随着更多车主对智能驾驶技术的接受,智能汽车市场将迎来更为复杂和多元化的需求。如何平衡技术的先进性和驾驶安全性,如何通过持续的优化和调整提升用户体验,将成为未来智能汽车技术发展的重要方向。东风纳米的应对策略为整个行业提供了宝贵的经验,尤其是在技术改进和用户沟通方面的做法,值得其他车企借鉴。
东风纳米对L2智能驾驶辅助功能偏右问题的迅速回应和后续优化措施,表明了其在智能驾驶领域的技术成熟度和责任担当。这一事件也提醒我们,智能驾驶虽已取得显著进展,但要实现真正的自动化与精确控制,还需在技术层面不断打磨和调整。




-
 错过等一年的春日花海,济宁花期不容错过2025-04-15 02:49:32随着春天的脚步悄然临近,济宁的街头巷尾仿佛瞬间焕发了生机。大地回暖,万物复苏,城市的每个角落都在迎接春天的到来。海棠的粉...
错过等一年的春日花海,济宁花期不容错过2025-04-15 02:49:32随着春天的脚步悄然临近,济宁的街头巷尾仿佛瞬间焕发了生机。大地回暖,万物复苏,城市的每个角落都在迎接春天的到来。海棠的粉... -
 北汽集团辟谣中心上线,强化网络信息治理,捍卫企业声誉2025-06-01 14:50:13在信息化迅猛发展的今天,互联网已成为公众获取信息的主要渠道。随之而来的虚假信息和恶意谣言也在一定程度上扰乱了网络秩序,甚...
北汽集团辟谣中心上线,强化网络信息治理,捍卫企业声誉2025-06-01 14:50:13在信息化迅猛发展的今天,互联网已成为公众获取信息的主要渠道。随之而来的虚假信息和恶意谣言也在一定程度上扰乱了网络秩序,甚... -
 20万轻松拥有豪华SUV 奥迪Q5L 2022款 40T 豪2025-05-09 20:46:03奥迪Q5L自2018年推出以来,凭借其独特的设计与超凡的性能,在豪华SUV市场中迅速站稳脚跟。作为奥迪Q5的加长版,Q5...
20万轻松拥有豪华SUV 奥迪Q5L 2022款 40T 豪2025-05-09 20:46:03奥迪Q5L自2018年推出以来,凭借其独特的设计与超凡的性能,在豪华SUV市场中迅速站稳脚跟。作为奥迪Q5的加长版,Q5... -

-
 6月周末杭州漫游指南:这些萌趣市集千万别错过!2024-06-04 20:19:58你打算去哪里玩呢?如果还没想好的话,可以看看杭州的一些周末市集。咖啡、宠物、亲子、手工、啤酒……杭州6月的各种有趣市集和...
6月周末杭州漫游指南:这些萌趣市集千万别错过!2024-06-04 20:19:58你打算去哪里玩呢?如果还没想好的话,可以看看杭州的一些周末市集。咖啡、宠物、亲子、手工、啤酒……杭州6月的各种有趣市集和... -
 深度试驾体验:零跑C16,15万级别6座SUV的超值选择2025-04-18 20:18:08在新能源汽车市场的激烈竞争中,零跑C16凭借出色的产品实力,一跃成为消费者热捧的焦点。这款15万元级别的6座SUV,凭借...
深度试驾体验:零跑C16,15万级别6座SUV的超值选择2025-04-18 20:18:08在新能源汽车市场的激烈竞争中,零跑C16凭借出色的产品实力,一跃成为消费者热捧的焦点。这款15万元级别的6座SUV,凭借...